Dinamica reprezintă acea ramură a mecanicii care studiază cauzele mișcării... Afișează mai mult
Înscrie-te pentru a vedea CONȚINUTULE gratuit!
Acces la toate documentele
Îmbunătățește notele tale!
Alătură-te milioanelor de elevi
Knowunity AI
Mai mult
Materii
Triangle Congruence and Similarity Theorems
Triangle Properties and Classification
Linear Equations and Graphs
Geometric Angle Relationships
Trigonometric Functions and Identities
Equation Solving Techniques
Circle Geometry Fundamentals
Division Operations and Methods
Basic Differentiation Rules
Exponent and Logarithm Properties
Afișează toate materiile
Human Organ Systems
Reproductive Cell Cycles
Biological Sciences Subdisciplines
Cellular Energy Metabolism
Autotrophic Energy Processes
Inheritance Patterns and Principles
Biomolecular Structure and Organization
Cell Cycle and Division Mechanics
Cellular Organization and Development
Biological Structural Organization
Afișează toate materiile
Chemical Sciences and Applications
Atomic Structure and Composition
Molecular Electron Structure Representation
Atomic Electron Behavior
Matter Properties and Water
Mole Concept and Calculations
Gas Laws and Behavior
Periodic Table Organization
Chemical Thermodynamics Fundamentals
Chemical Bond Types and Properties
Afișează toate materiile
European Renaissance and Enlightenment
European Cultural Movements 800-1920
American Revolution Era 1763-1797
American Civil War 1861-1865
Global Imperial Systems
Mongol and Chinese Dynasties
U.S. Presidents and World Leaders
Historical Sources and Documentation
World Wars Era and Impact
World Religious Systems
Afișează toate materiile
Classic and Contemporary Novels
Literary Character Analysis
Rhetorical Theory and Practice
Classic Literary Narratives
Reading Analysis and Interpretation
Narrative Structure and Techniques
English Language Components
Influential English-Language Authors
Basic Sentence Structure
Narrative Voice and Perspective
Afișează toate materiile
194
•
Actualizat May 17, 2026
•
Codrin Carabas
@codrincarabas
Dinamica reprezintă acea ramură a mecanicii care studiază cauzele mișcării... Afișează mai mult
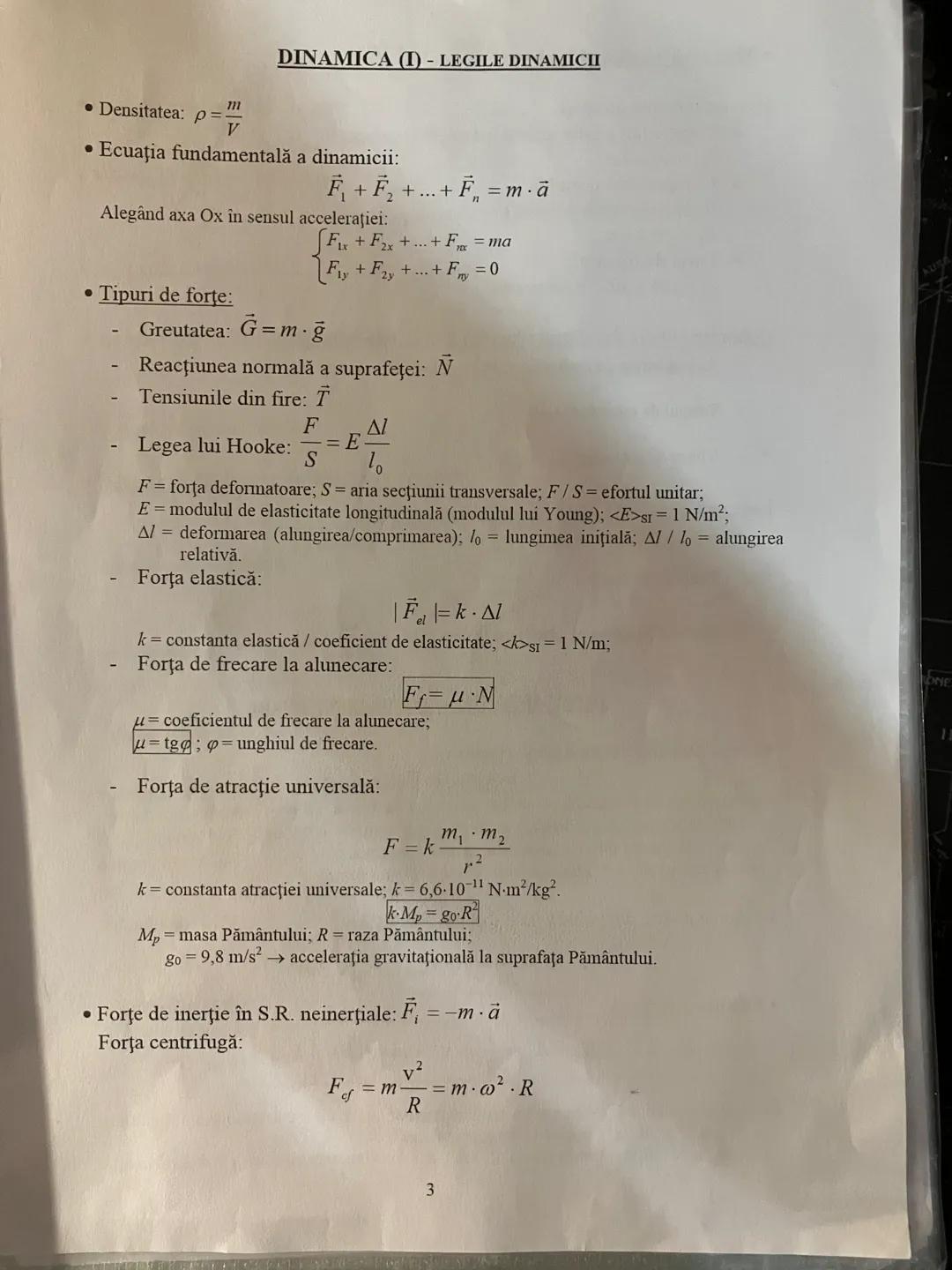
Ecuația fundamentală a dinamicii reprezintă baza acestei ramuri a fizicii: suma tuturor forțelor care acționează asupra unui corp este egală cu produsul dintre masa corpului și accelerația sa $\vec{F_1} + \vec{F_2} + ... + \vec{F_n} = m \cdot \vec{a}$. Dacă alegem axa Ox în sensul accelerației, putem scrie ecuațiile pe componente.
Dintre cele mai importante forțe studiate în dinamică amintim greutatea $\vec{G} = m \cdot \vec{g}$, reacțiunea normală $\vec{N}$ și tensiunea din fire $\vec{T}$. Un alt concept esențial este Legea lui Hooke, care descrie comportamentul elastic al corpurilor: , unde E este modulul lui Young.
Forța elastică $|F_{el}| = k \cdot \Delta l$ este proporțională cu deformarea și depinde de constanta elastică k. Forța de frecare la alunecare $\vec{F_f} = \mu \vec{N}$ se opune mișcării și depinde de coeficientul de frecare și reacțiunea normală. Pentru corpurile cerești, avem forța de atracție universală $F = k \frac{m_1 \cdot m_2}{r^2}$.
💡 De reținut: În sistemele de referință neinerțiale, trebuie să introducem forțe de inerție pentru ca legile dinamicii să rămână valabile. Un exemplu este forța centrifugă: .
Companionul nostru AI este creat special pentru nevoile studenților. Bazându-ne pe milioanele de materiale de pe platformă, putem oferi răspunsuri exacte și relevante pentru studenți. Dar nu este vorba doar despre răspunsuri, companionul este mai ales despre ghidarea studenților prin provocările zilnice de învățare, cu planuri de studiu personalizate, chestionare sau conținuturi în chat și personalizare 100% bazată pe abilitățile și evoluțiile studenților.
Aplicația este disponibilă în Google Play Store și Apple App Store.
Da! Bucură-te de access la materiale de studiu, conectează-te cu alți elevi, și primește ajutor instant - toate acestea la un click distanță. În plus, câștigă puncte ca să deblochezi mai multe funcționalități!
App Store
Google Play
Aplicația este foarte ușor de utilizat și bine concepută. Am găsit tot ce căutam până acum și am reușit să învăț multe din prezentări! Cu siguranță voi folosi aplicația pentru o temă la clasă! Și desigur, ajută mult ca sursă de inspirație.
Ștefan S
utilizator iOS
Această aplicație este super. Sunt atât de multe materiale de studiu și ajutor pentru elevi [...]. Materia mea mai problematică este franceza, de exemplu, și aplicația oferă foarte multe materiale ajutătoare. Mulțumită acestei aplicații, mi-am îmbunătățit franceza. Aș recomanda-o oricui.
Samantha Klich
utilizator Android
Wow, sunt cu adevărat impresionat. Am încercat aplicația pentru că am văzut-o promovată de multe ori și am rămas uimit. Aceasta este AJUTORUL de care ai nevoie pentru școală și, mai presus de toate, oferă atât de multe lucruri, precum exerciții și fișe de informații, care mi-au fost FOARTE de ajutor.
Anna
utilizator iOS
Te ajută să înveți foarte repede și ști foarte bine ce ai dori tu să înveți, vă recomand cu drag să încercați și să învățați mai repede.!
Thomas R
utilizator iOS
Foarte bună aplicația!!!! Mă ajută să înțeleg mult mai bine lecțiile și temele le termin mult mai repede.👍❤️
Paul P
utilizator Android
Te ajută foarte bine la teme acest robot,recomand!
David K
utilizator iOS
Aplicația e grozavă! Tot ce trebuie să fac este să introduc subiectul în bara de căutare și primesc răspunsul foarte rapid. Nu mai trebuie să mă uit la 10 videoclipuri pe YouTube pentru a înțelege ceva, deci îmi economisesc timpul. Super recomandat!
Sudenaz Ocak
utilizator Android
La școală eram chiar slab la matematică, dar datorită aplicației, mă descurc mai bine acum. Sunt atât de recunoscător că ai creat aplicația.
Greenlight Bonnie
utilizator Android
Această aplicație e super interesantă și seamănă ca tiktok-ul doar că tu ai doar teorie și explicații.
Karla S
utilizator Android
Nu mai trebuie să stau cu orele să învăț după caiet când pot să citesc de 2 ori lecțiile care apar aici și iau 10 la test ! Knowunity m-a ajutat să iau nota 9,20 la română ! Voi recomanda ff tare aceasta aplicate , să nu uităm ca are și chat GPT !👍🏻
Denisa B
utilizator iOS
CHESTIONARELE ȘI FLASHCARD-URILE SUNT ATÂT DE UTILE ȘI IUBESC Knowunity AI. E LITERALMENTE CA CHATGPT DOAR CĂ MAI DEȘTEPT!! M-A AJUTAT ȘI CU PROBLEMELE MELE CU MASCARA!! PLUS CU MATERIILE MELE ADEVĂRATE! EVIDENT 😍😁😲🤑💗✨🎀😮
Sarah L
utilizator Android
Este foarte bună te ajută la teme te face să înțelegi lecțiile am înțeles o lecție în 20 de minute i singură nu reușeam să o învăț dar cu Knowunity am învățat-o foarte ușor
Alessia V
utilizator iOS
Aplicația este foarte ușor de utilizat și bine concepută. Am găsit tot ce căutam până acum și am reușit să învăț multe din prezentări! Cu siguranță voi folosi aplicația pentru o temă la clasă! Și desigur, ajută mult ca sursă de inspirație.
Ștefan S
utilizator iOS
Această aplicație este super. Sunt atât de multe materiale de studiu și ajutor pentru elevi [...]. Materia mea mai problematică este franceza, de exemplu, și aplicația oferă foarte multe materiale ajutătoare. Mulțumită acestei aplicații, mi-am îmbunătățit franceza. Aș recomanda-o oricui.
Samantha Klich
utilizator Android
Wow, sunt cu adevărat impresionat. Am încercat aplicația pentru că am văzut-o promovată de multe ori și am rămas uimit. Aceasta este AJUTORUL de care ai nevoie pentru școală și, mai presus de toate, oferă atât de multe lucruri, precum exerciții și fișe de informații, care mi-au fost FOARTE de ajutor.
Anna
utilizator iOS
Te ajută să înveți foarte repede și ști foarte bine ce ai dori tu să înveți, vă recomand cu drag să încercați și să învățați mai repede.!
Thomas R
utilizator iOS
Foarte bună aplicația!!!! Mă ajută să înțeleg mult mai bine lecțiile și temele le termin mult mai repede.👍❤️
Paul P
utilizator Android
Te ajută foarte bine la teme acest robot,recomand!
David K
utilizator iOS
Aplicația e grozavă! Tot ce trebuie să fac este să introduc subiectul în bara de căutare și primesc răspunsul foarte rapid. Nu mai trebuie să mă uit la 10 videoclipuri pe YouTube pentru a înțelege ceva, deci îmi economisesc timpul. Super recomandat!
Sudenaz Ocak
utilizator Android
La școală eram chiar slab la matematică, dar datorită aplicației, mă descurc mai bine acum. Sunt atât de recunoscător că ai creat aplicația.
Greenlight Bonnie
utilizator Android
Această aplicație e super interesantă și seamănă ca tiktok-ul doar că tu ai doar teorie și explicații.
Karla S
utilizator Android
Nu mai trebuie să stau cu orele să învăț după caiet când pot să citesc de 2 ori lecțiile care apar aici și iau 10 la test ! Knowunity m-a ajutat să iau nota 9,20 la română ! Voi recomanda ff tare aceasta aplicate , să nu uităm ca are și chat GPT !👍🏻
Denisa B
utilizator iOS
CHESTIONARELE ȘI FLASHCARD-URILE SUNT ATÂT DE UTILE ȘI IUBESC Knowunity AI. E LITERALMENTE CA CHATGPT DOAR CĂ MAI DEȘTEPT!! M-A AJUTAT ȘI CU PROBLEMELE MELE CU MASCARA!! PLUS CU MATERIILE MELE ADEVĂRATE! EVIDENT 😍😁😲🤑💗✨🎀😮
Sarah L
utilizator Android
Este foarte bună te ajută la teme te face să înțelegi lecțiile am înțeles o lecție în 20 de minute i singură nu reușeam să o învăț dar cu Knowunity am învățat-o foarte ușor
Alessia V
utilizator iOS
Codrin Carabas
@codrincarabas
Dinamica reprezintă acea ramură a mecanicii care studiază cauzele mișcării corpurilor. Spre deosebire de cinematică, dinamica ne ajută să înțelegem forțele care acționează asupra corpurilor și relația acestora cu mișcarea rezultată.
Acces la toate documentele
Îmbunătățește notele tale!
Alătură-te milioanelor de elevi
Ecuația fundamentală a dinamicii reprezintă baza acestei ramuri a fizicii: suma tuturor forțelor care acționează asupra unui corp este egală cu produsul dintre masa corpului și accelerația sa $\vec{F_1} + \vec{F_2} + ... + \vec{F_n} = m \cdot \vec{a}$. Dacă alegem axa Ox în sensul accelerației, putem scrie ecuațiile pe componente.
Dintre cele mai importante forțe studiate în dinamică amintim greutatea $\vec{G} = m \cdot \vec{g}$, reacțiunea normală $\vec{N}$ și tensiunea din fire $\vec{T}$. Un alt concept esențial este Legea lui Hooke, care descrie comportamentul elastic al corpurilor: , unde E este modulul lui Young.
Forța elastică $|F_{el}| = k \cdot \Delta l$ este proporțională cu deformarea și depinde de constanta elastică k. Forța de frecare la alunecare $\vec{F_f} = \mu \vec{N}$ se opune mișcării și depinde de coeficientul de frecare și reacțiunea normală. Pentru corpurile cerești, avem forța de atracție universală $F = k \frac{m_1 \cdot m_2}{r^2}$.
💡 De reținut: În sistemele de referință neinerțiale, trebuie să introducem forțe de inerție pentru ca legile dinamicii să rămână valabile. Un exemplu este forța centrifugă: .
Companionul nostru AI este creat special pentru nevoile studenților. Bazându-ne pe milioanele de materiale de pe platformă, putem oferi răspunsuri exacte și relevante pentru studenți. Dar nu este vorba doar despre răspunsuri, companionul este mai ales despre ghidarea studenților prin provocările zilnice de învățare, cu planuri de studiu personalizate, chestionare sau conținuturi în chat și personalizare 100% bazată pe abilitățile și evoluțiile studenților.
Aplicația este disponibilă în Google Play Store și Apple App Store.
Da! Bucură-te de access la materiale de studiu, conectează-te cu alți elevi, și primește ajutor instant - toate acestea la un click distanță. În plus, câștigă puncte ca să deblochezi mai multe funcționalități!
1
Instrumente inteligente NOU
Transformă această notiță în: ✓ 50+ întrebări de exersare ✓ Flashcard-uri interactive ✓ Examen de practică complet ✓ Planuri de eseu
App Store
Google Play
Aplicația este foarte ușor de utilizat și bine concepută. Am găsit tot ce căutam până acum și am reușit să învăț multe din prezentări! Cu siguranță voi folosi aplicația pentru o temă la clasă! Și desigur, ajută mult ca sursă de inspirație.
Ștefan S
utilizator iOS
Această aplicație este super. Sunt atât de multe materiale de studiu și ajutor pentru elevi [...]. Materia mea mai problematică este franceza, de exemplu, și aplicația oferă foarte multe materiale ajutătoare. Mulțumită acestei aplicații, mi-am îmbunătățit franceza. Aș recomanda-o oricui.
Samantha Klich
utilizator Android
Wow, sunt cu adevărat impresionat. Am încercat aplicația pentru că am văzut-o promovată de multe ori și am rămas uimit. Aceasta este AJUTORUL de care ai nevoie pentru școală și, mai presus de toate, oferă atât de multe lucruri, precum exerciții și fișe de informații, care mi-au fost FOARTE de ajutor.
Anna
utilizator iOS
Te ajută să înveți foarte repede și ști foarte bine ce ai dori tu să înveți, vă recomand cu drag să încercați și să învățați mai repede.!
Thomas R
utilizator iOS
Foarte bună aplicația!!!! Mă ajută să înțeleg mult mai bine lecțiile și temele le termin mult mai repede.👍❤️
Paul P
utilizator Android
Te ajută foarte bine la teme acest robot,recomand!
David K
utilizator iOS
Aplicația e grozavă! Tot ce trebuie să fac este să introduc subiectul în bara de căutare și primesc răspunsul foarte rapid. Nu mai trebuie să mă uit la 10 videoclipuri pe YouTube pentru a înțelege ceva, deci îmi economisesc timpul. Super recomandat!
Sudenaz Ocak
utilizator Android
La școală eram chiar slab la matematică, dar datorită aplicației, mă descurc mai bine acum. Sunt atât de recunoscător că ai creat aplicația.
Greenlight Bonnie
utilizator Android
Această aplicație e super interesantă și seamănă ca tiktok-ul doar că tu ai doar teorie și explicații.
Karla S
utilizator Android
Nu mai trebuie să stau cu orele să învăț după caiet când pot să citesc de 2 ori lecțiile care apar aici și iau 10 la test ! Knowunity m-a ajutat să iau nota 9,20 la română ! Voi recomanda ff tare aceasta aplicate , să nu uităm ca are și chat GPT !👍🏻
Denisa B
utilizator iOS
CHESTIONARELE ȘI FLASHCARD-URILE SUNT ATÂT DE UTILE ȘI IUBESC Knowunity AI. E LITERALMENTE CA CHATGPT DOAR CĂ MAI DEȘTEPT!! M-A AJUTAT ȘI CU PROBLEMELE MELE CU MASCARA!! PLUS CU MATERIILE MELE ADEVĂRATE! EVIDENT 😍😁😲🤑💗✨🎀😮
Sarah L
utilizator Android
Este foarte bună te ajută la teme te face să înțelegi lecțiile am înțeles o lecție în 20 de minute i singură nu reușeam să o învăț dar cu Knowunity am învățat-o foarte ușor
Alessia V
utilizator iOS
Aplicația este foarte ușor de utilizat și bine concepută. Am găsit tot ce căutam până acum și am reușit să învăț multe din prezentări! Cu siguranță voi folosi aplicația pentru o temă la clasă! Și desigur, ajută mult ca sursă de inspirație.
Ștefan S
utilizator iOS
Această aplicație este super. Sunt atât de multe materiale de studiu și ajutor pentru elevi [...]. Materia mea mai problematică este franceza, de exemplu, și aplicația oferă foarte multe materiale ajutătoare. Mulțumită acestei aplicații, mi-am îmbunătățit franceza. Aș recomanda-o oricui.
Samantha Klich
utilizator Android
Wow, sunt cu adevărat impresionat. Am încercat aplicația pentru că am văzut-o promovată de multe ori și am rămas uimit. Aceasta este AJUTORUL de care ai nevoie pentru școală și, mai presus de toate, oferă atât de multe lucruri, precum exerciții și fișe de informații, care mi-au fost FOARTE de ajutor.
Anna
utilizator iOS
Te ajută să înveți foarte repede și ști foarte bine ce ai dori tu să înveți, vă recomand cu drag să încercați și să învățați mai repede.!
Thomas R
utilizator iOS
Foarte bună aplicația!!!! Mă ajută să înțeleg mult mai bine lecțiile și temele le termin mult mai repede.👍❤️
Paul P
utilizator Android
Te ajută foarte bine la teme acest robot,recomand!
David K
utilizator iOS
Aplicația e grozavă! Tot ce trebuie să fac este să introduc subiectul în bara de căutare și primesc răspunsul foarte rapid. Nu mai trebuie să mă uit la 10 videoclipuri pe YouTube pentru a înțelege ceva, deci îmi economisesc timpul. Super recomandat!
Sudenaz Ocak
utilizator Android
La școală eram chiar slab la matematică, dar datorită aplicației, mă descurc mai bine acum. Sunt atât de recunoscător că ai creat aplicația.
Greenlight Bonnie
utilizator Android
Această aplicație e super interesantă și seamănă ca tiktok-ul doar că tu ai doar teorie și explicații.
Karla S
utilizator Android
Nu mai trebuie să stau cu orele să învăț după caiet când pot să citesc de 2 ori lecțiile care apar aici și iau 10 la test ! Knowunity m-a ajutat să iau nota 9,20 la română ! Voi recomanda ff tare aceasta aplicate , să nu uităm ca are și chat GPT !👍🏻
Denisa B
utilizator iOS
CHESTIONARELE ȘI FLASHCARD-URILE SUNT ATÂT DE UTILE ȘI IUBESC Knowunity AI. E LITERALMENTE CA CHATGPT DOAR CĂ MAI DEȘTEPT!! M-A AJUTAT ȘI CU PROBLEMELE MELE CU MASCARA!! PLUS CU MATERIILE MELE ADEVĂRATE! EVIDENT 😍😁😲🤑💗✨🎀😮
Sarah L
utilizator Android
Este foarte bună te ajută la teme te face să înțelegi lecțiile am înțeles o lecție în 20 de minute i singură nu reușeam să o învăț dar cu Knowunity am învățat-o foarte ușor
Alessia V
utilizator iOS